Full-Body Inverse Kinematics
Within the PRESENCE framework, the SenseGlove Unity Plugin already enabled detailed hand interaction through finger tracking, haptics, and grasp simulation. However, the implementation was originally designed around a pair of floating hands. While effective for interaction-focused applications, the absence of a connected body reduced the sense of embodiment during more immersive XR experiences.
In virtual reality, interaction is rarely limited to what users see. The feeling of “Presence depends just as much on how naturally one’s virtual body responds to movement and touch. And in social XR experiences, users are not only interacting with objects: They are constantly interpreting the movements and intentions of other people. Subtle body language such as posture, gaze direction, and locomotion all contribute to communication and social presence.
The QuickVR system, developed by the University of Barcelona’s EventLab research group, offered a compelling foundation for full-body embodiment in VR. Combining locomotion, inverse kinematics, and support for Meta Quest hand tracking, QuickVR provided a complete avatar framework capable of translating user movement into believable full-body motion.
By combining both systems, we were able to bridge high-fidelity hand interaction with full-body avatar embodiment, creating a more immersive XR experience.
Combining SenseGlove and QuickVR
QuickVR already included support for both controllers and hand-tracking, and featured an inverse kinematic avatar capable of reconstructing natural body movement from limited tracking data. This made it an ideal candidate for extending the PRESENCE interaction ecosystem beyond floating hands.
To achieve this integration, SenseGlove support was implemented inside QuickVR as a custom QuickHandBase and QuickHandTracking component architecture with custom offsets. The original SenseGlove “Blue Hand” prefab -including its haptics, colliders, and grab logic- is still spawned into the scene during runtime. However, this particular model itself is hidden from view.
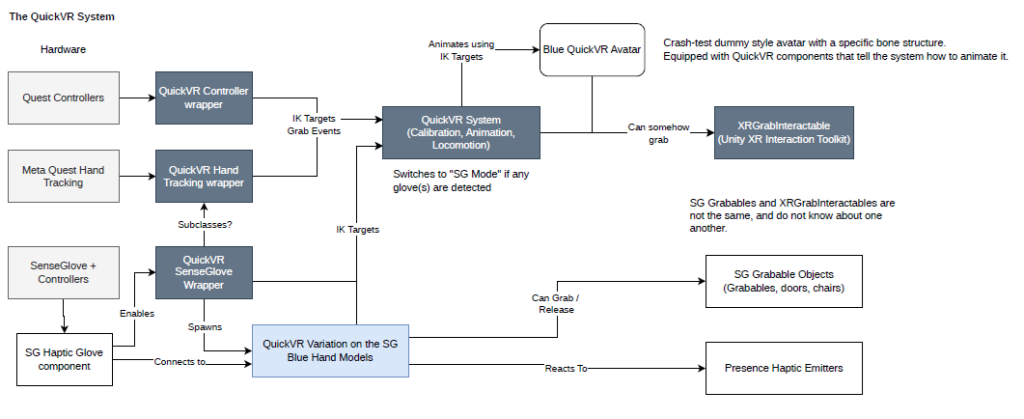
In practice, this means the invisible SenseGlove hand continues to handle all interaction and haptic functionality behind the scenes, while QuickVR drives the visible full-body avatar through its inverse kinematics system. The user no longer sees only isolated floating hands: they can see their own virtual body, with more natural arm movement, elbow positioning, shoulder rotation, and body alignment. This creates a stronger sense of embodiment and a closer connection between the user and their virtual representation. Once the Didimo avatar integration is completed, the same approach can also support full-body avatars for other users in multiplayer VR settings.
Preserving the SenseGlove Interaction System
One of the most important design decisions during development was maintaining compatibility with the existing SenseGlove interaction ecosystem, since the existing PRESENCE use cases already rely on this SenseGlove interaction logic. Rather than re-implementing the same interaction logic through QuickVR, we chose to funnel data from controllers, hand tracking, and glove tracking through the existing SenseGlove Plugin pipeline, which is already compatible with all three.
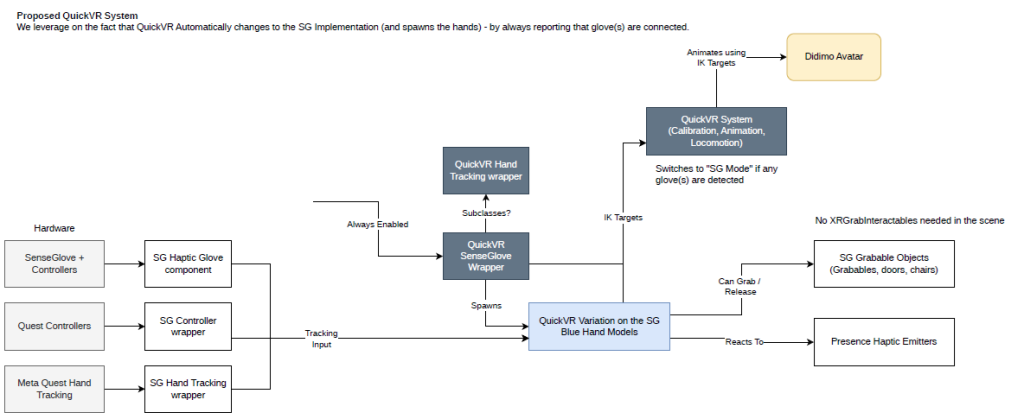
The SenseGlove QuickHandComponent is essentially “always on” to allow this behaviour. The system relies on the SenseGlove Unity Plugin to determine when to switch between the three different input methods. The invisible SenseGlove hand continues handling all interaction and haptic functionality behind the scenes, while the visible QuickVR avatar reproduces the movement through the IK body system.
The final result is a unified avatar system capable of supporting multiple forms of XR interaction simultaneously. Within the broader goals of the PRESENCE project, integrations like this represent another step toward more believable, immersive, and human-centered virtual experiences.